 Translate
TranslateSparkiDuino downloaden en installeren
Je kunt SparkiDuino op de website van Arcbotics downloaden. De installatie wijst zich vanzelf en is niet zo moeilijk. Sluit je Sparki met de USB kabel aan op je PC. Het duurt een tijdje voor je PC de drivers heeft geinstalleerd. Open SparkiDuino en kijk in het menu bij Hulpmiddelen en kijk dan bij Board of "ArcBotics Sparki" is geselecteerd. Kijk daarna bij Poort of hij de juiste Com poort heeft gevonden.
Bewegingen van Sparki
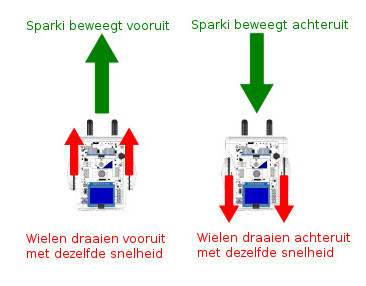
Sparki heeft twee wielen waarmee hij vooruit en achteruit kan en hij kan ook draaien. Als dezelfde hoeveelheid kracht op beide wielen wordt gegeven dan kan hij vooruit of achteruit gaan. Wordt er aan één wiel meer kracht gegeven dan het andere dan draait Sparki. Gaat één wiel vooruit en één wiel achteruit met dezelfde kracht dan draait Sparki om zijn eigen middelpunt. Dit middelpunt is waar je de stift in kan stoppen. Hoe je de wielen in verschillende snelheden kan programmeren leer je in een volgende les.
Sparki Sketch
Open SparkiDuino. Je ziet nu een lege Sketch. In Arduino of SparkiDuino programmeeromgeving wordt je programma een Sketch genoemd. De lege Sketch ziet er uit als het voorbeeld hieronder.
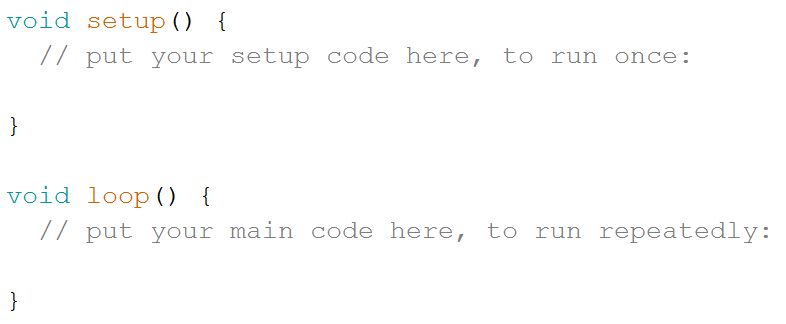
Je programma wordt ingedeeld in twee delen. Eerste deel is:
void setup(){}
en het tweede deel is void loop(){}.
Tussen deze { } accolades moet je jouw programma schrijven. Wat achter deze // dubbele schuine strepen staat is commentaar en wordt niet uitgevoerd in het programma.
De regels code die je in het eerste deel schrijft worden maar één keer uitgevoerd. De regels code die je in het tweede deel schrijft worden steeds herhaald.
In de eerste regel van je programma, helemaal
bovenaan moet je aangeven dat je de sparki bibliotheek gebruikt. #include <sparki.h> Bekijk het voorbeeld hieronder:
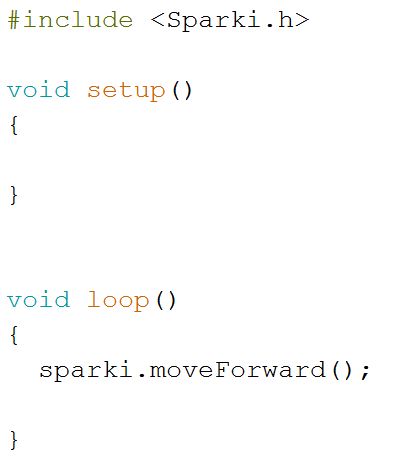
Je ziet in het tweede deel van je programma, in de loop, sparki.moveForward();. Met deze
regel code gaat Sparki vooruit. Omdat het in de loop staat zal dit herhaald worden. Probeer het maar eens in SparkiDuino!
Sparki aansluiten op je computer
Sluit Sparki met de USB kabel aan op je PC. Zet Sparki aan. Het kan best lang duren voordat het stuurprogramma geinstalleerd is.
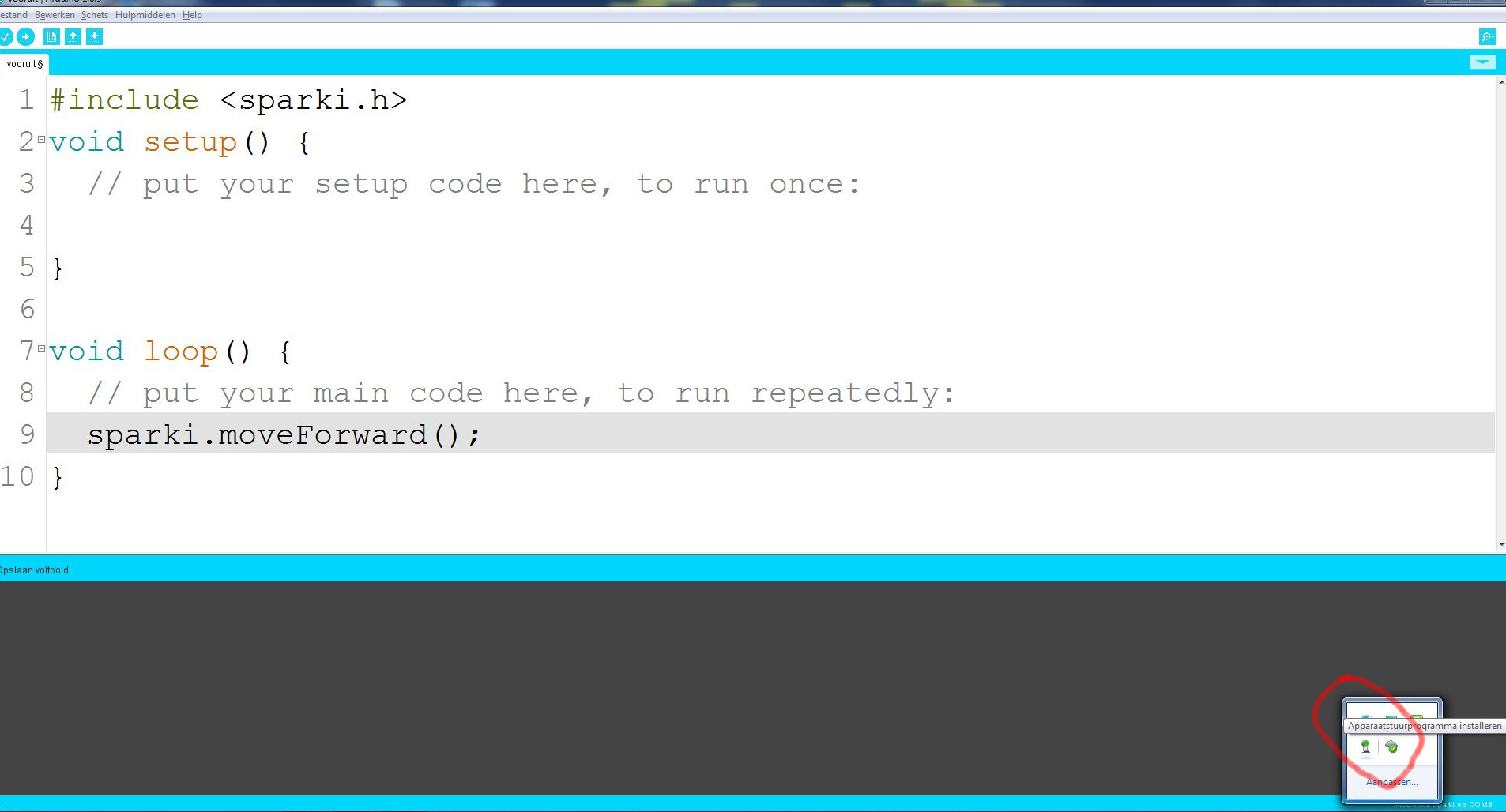

Sketch uploaden
Zorg dat in SparkiDuino in het menu bij Hulpmiddelen bij Board: "ArcBotics Sparki" hebt staan en daaronder bij Poort de juiste Com poort, vaak de onderste in de lijst met Com poorten. Het duurt soms even voordat de juiste Com poort weergegeven wordt.
Klik dan op de blauwe pijl links boven: 
Delay of vertraging
Sparki ging vooruit met: spari.moveForward(); en bleef vooruit gaan. Om te programmeren hoe lang Sparki vooruit moet gaan kun je de delay functie gebruiken: delay(3000);. Delay betekent vertraging. Tussen haakjes staat
hoe lang de vertraging moet zijn in milliseconden. Dus 3000 milliseconden is 3 seconden. Stond de delay regel er niet tussen dan blijft Sparki stil staan omdat vooruit en acheruit elkaar zo
snel opvolgen dat Sparki niet zal bewegen.
In onderstaand voorbeeld zal Sparki ook nog naar links draaien en daarna naar rechts. Hoever hij draait hangt af van de delay. Expirimenteer maar eens!
Hieronder een lijst met Sparki commando's. Probeer ze eens uit in je Sketch.
sparki.moveForward(); delay(3000); sparki.moveBackward(); delay(3000); sparki.moveLeft(); delay(3000); sparki.moveRight(); delay(3000); sparki.moveStop(); delay(3000);
Vooruit in centimeters en draaien in graden
In plaats van een delay te gebruiken kun je ook heel precies programmeren hoeveel centimeter Sparki naar voren of naar achteren moet gaan. Je geeft het aantal centimeter als argument mee aan de functie: sparki.moveForward(15);. Sparki zal hier 15 centimter naar voren gaan.
Je kunt Sparki ook precies laten draaien. Je moet dan in de functie het aantal graden meegeven als argument
tussen de ( ) haakjes: sparki.moveLeft(90);.
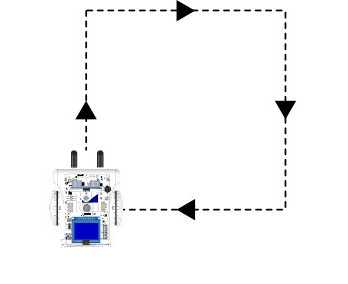
Maak een vierkant
In deze opdracht mag je de stift in Sparki stoppen en Sparki zo programmeren dat hij een vierkant tekent. Weet je niet hoe het moet lees dan deze pagina nog eens goed door. Wil je het voorbeeld programma, kijk dan hier: Voorbeeld
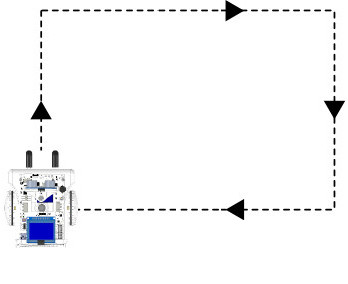
Opdracht
Schrijf een programma waarmee Sparki een rechthoek tekent.
Voorbeeld
Einde van deze eerste les. De volgende les gaat over de Grijpers

